Mittekontaktne induktiivsusandur on paigutatud andurina, mis on võimeline reageerima selle elektromagnetvälja sattunud metallesemetele. Tänu sellele induktiivsete lähedusandurite omadusele on võimalik jälgida seadmete liikuvate osade liikumist ja vajadusel ajammehhanismi mootorit välja lülitada. Magnetvälja muutuste äratundmiseks ja analüüsimiseks lisatakse nende koostisesse spetsiaalne elektrooniline seade, mida nimetatakse kontrolleriks (komparaatoriks).
Seade ja tööpõhimõte

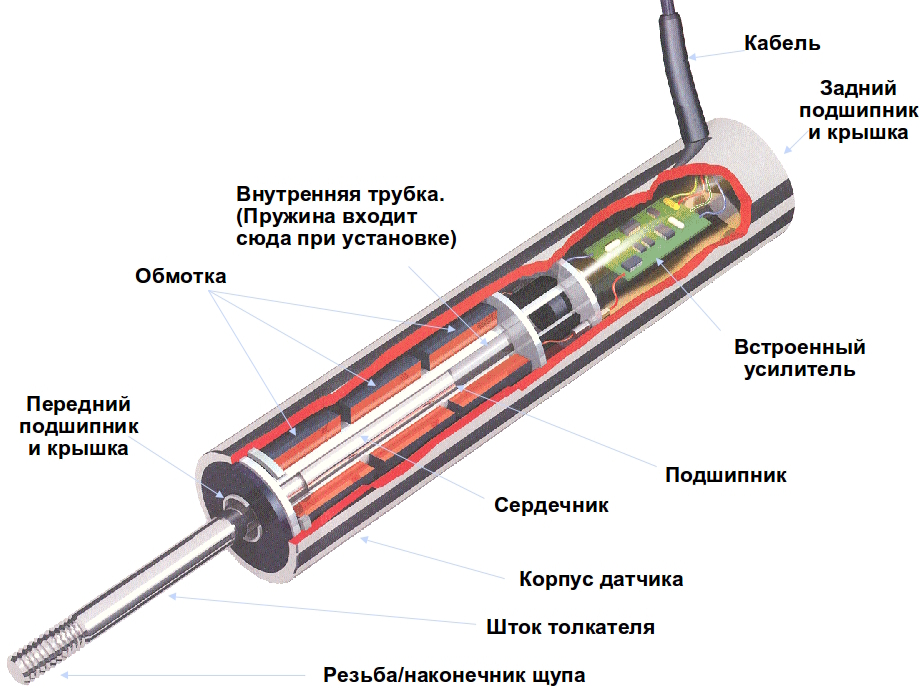
Induktiivsed asendiandurid sisaldavad lisaks elektroonilisele komparaatorile järgmisi kohustuslikke komponente:
- terasest korpus koos pistikuga juhtme ühendamiseks;
- sisseehitatud tundlik element, mis registreerib magnetvälja muutusi, on valmistatud mähisega terassüdamiku kujul;
- täitevrelee moodul;
- LED-il olev aktiveerimisnäidik.
Metallist andurite erinevate mudelite konstruktsioonidel võib olla mõningaid erinevusi. Need ei mõjuta induktsioonandurit ennast, selle tööpõhimõte ei muutu.
Vastavalt seadme konstruktsioonile kirjeldatakse selle töö olemust järgmiselt:
- juhitava objekti metallosa liikumine viib anduri tundliku elemendi induktiivsuse muutumiseni;
- kõrvalekalle on seletatav selle magnetvälja moonutamisega, mille tulemusena muutuvad elektriahela parameetrid ja selle aktiveerimine (LED süttib);
- pärast seda elektrooniline moodul käivitub ja saadab signaali täiturmehhanismile;
- Kui saabub impulss, mis näitab, et liikumine ületab lubatud piiri, ühendab väljund (relee) sõlm kontrollitud seadmed võrgust lahti.
Igal mudelil on oma nihketundlikkuse indikaator – nihkevahe. Erinevate proovide puhul varieerub see parameeter 1 mikronist 20 millimeetrini.
Induktiivandurite parameetrid

Lisaks reaktsioonivahemikule või tundlikkusele iseloomustavad induktiivandurit järgmised jõudlusnäitajad:
- Erinevate proovide maandumiskeerme suurus (läbimõõt) on vahemikus 8 kuni 30 mm.
- Nimitoitepinge temperatuuril pluss 20 kraadi, kuni 90 volti alalisvoolu ja kuni 230 volti vahelduvvoolu.
- Korpuse kogupikkus - selle väärtus sõltub tööpingest.
Viimane näitaja võib erinevates valimites väga erineda.
Seadme tundliku või aktiivse tsooni jaoks võetakse kasutusele teine parameeter, mida nimetatakse garanteeritud reageerimispiiriks. Selle alumine piir on null ja ülemine piir on 80 protsenti nimiväärtusest. Seda indikaatorit nimetatakse mõnikord töövahe parandusteguriks.
Tundliku seadme funktsionaalsuse sama oluline näitaja on pistiku ühendusjuhtmete arv. Tavaliselt on neid kaks või kolm: kaks toiteallikat ja üks ahela aktiveerimiseks. Siiski on võimalikud ühendused, mis kasutavad nelja või viit kontaktpunkti. Sellised näidised sisaldavad lisaks kahele toitejuhile kahte koormusväljundit. Sellisel juhul kasutatakse seadme enda töörežiimi valimiseks viiendat juhti.
Väljundite tüübid ja ühendusviisid
Tundliku seadme toimimise hindamiseks võetakse kasutusele spetsiaalne omadus, mida hinnatakse selle väljundparameetrite polaarsuse oleku järgi. Vastavalt anduri elektroonilise vooluahela moodustavate pooljuhtelementide (transistoride) üldtunnustatud tähistusele nimetatakse neid väljundeid "PNP" ja "NPN".
Nende nimede erinevus seisneb selles, et need tähistavad tundlike seadmete toiteallika erinevat polaarsust (poolused). PNP transistorid lülitavad selle positiivse väljundi ja NPN - negatiivse. Väljundahelate koormus on enamasti juhtmikroprotsessor.
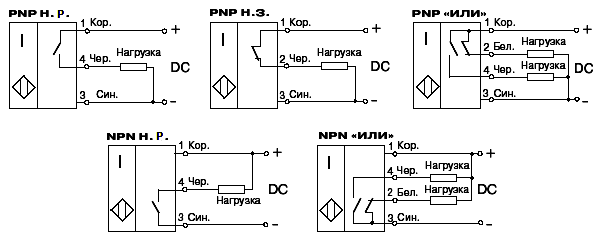
Sõltuvalt kontrolleri juhtimisahelast on induktiivsed andurid tähistatud kui HO (tavaliselt avatud) või NC - tavaliselt suletud sisendiga.
NPN-transistori võimalus on anduri ühendamiseks kõige levinum viis, kuna standardsete vooluahelate konstruktsioonide kohaselt on negatiivne juhe kõigi komponentide jaoks ühine. Sel juhul aktiveeritakse mikroprotsessorite ja muude juhtseadmete sisendid positiivse pingega.
Märgistus ühendamisel
Elektriskeemidel tähistatakse induktiivseid andureid tavaliselt rombi või ruudu kujul, mille sees on kaks vertikaalset joont. Sageli näitavad need ka väljundi tüüpi (tavaliselt avatud või suletud), mis vastab ühele pooljuhttransistoride tüübile. Enamik vooluringivalikuid määrab tavaliselt suletud rühma või mõlemad tüübid ühes paketis.
Klemmide värvikoodid

Praktikas on kasutusel standardne induktiivsusandurite klemmide märgistamise süsteem, mida järgivad eranditult kõik tundlike seadmete tootjad. Kuid enne nende paigaldamist on soovitatav hoolikalt jälgida ühenduse polaarsust ja kindlasti tutvuda toodetega kaasasolevate juhistega.
Kõigi andurite korpustel on juhtmete värvimärgistusega joonis, kui selle mõõtmed seda võimaldavad.
Standardne märge:
- Sinine tähendab alati negatiivset võimsussiini;
- pruun värv näitab positiivset juhti;
- must vastab anduri väljundile;
- Valge on lisaväljund või sisend.
Viimase märgistuse selgitamiseks tuleks seda kontrollida konkreetse seadmega kaasasolevate juhistega.
Anduri vead

Juhtsüsteemi võetud näitude viga mõjutab oluliselt mittekontaktse induktiivse anduri tööd. Selle koguväärtus kogutakse erinevate näitajate individuaalsetest mõõtmisvigadest: elektromagnetiline, temperatuur, riistvara, magnetiline elastsus ja paljud teised.
Elektromagnetiline viga on defineeritud kui juhuslikult esinev suurus.See ilmneb väliste magnetväljade poolt mähises indutseeritud parasiitide elektromagnetväljade tõttu. Tootmistingimustes luuakse see komponent toiteseadmetega, mille töösagedus on 50 hertsi. Temperatuuriviga on üks olulisemaid näitajaid, kuna enamik andureid saab töötada ainult teatud temperatuurivahemikus. Selle klassi seadmete projekteerimisel tuleb seda arvesse võtta.
Magnetiline elastsusviga on toodud seadme kokkupanemisel tekkivate südamiku deformatsioonide ebastabiilsuse indikaatorina, samuti sama tegurina, mis ilmneb selle töö ajal. Sisepinge ebastabiilsus magnetahelas põhjustab väljundsignaali töötlemisel vigu. Tundlikus seadmes endas tekkiv viga ilmneb väljastruktuuri mõju tõttu anduri metallelementide deformatsioonikoefitsiendile. Lisaks mõjutavad selle koguväärtust oluliselt tagasilöögid ja lüngad konstruktsiooni liikuvates osades.
Ühenduskaabli viga määratakse selle juhtmejuhtmete takistuse väärtuse kõrvalekallete põhjal sõltuvalt temperatuuritegurist, samuti kõrvaliste elektromagnetväljade ja EMF-i häiretest. Tensoanduri viga kui juhuslik suurus sõltub anduri mähiselementide (eriti selle mähise) valmistamise kvaliteedist. Erinevates töötingimustes on võimalik, et alalisvoolu mähise takistus võib muutuda, mis viib väljundsignaali "ujumiseni". Vananemisviga avaldub anduri liikuvate elementide kulumise, samuti magnetahela elektromagnetiliste omaduste muutumise tõttu.
Selle parameetri tegelikku väärtust on võimalik kontrollida ainult ülitäpsete mõõteriistade abil.Sel juhul tuleb arvestada anduri enda kinemaatilisi omadusi. Tundlike elementide projekteerimisel ja valmistamisel arvestatakse seda võimalust selle projekteerimisel eelnevalt.
Induktiiv- ja mahtuvusandureid iseloomustavad töörežiimid, millel on palju mõjutegureid, mis on määratud konkreetsete töötingimustega. Seetõttu on piirlülitina kasutamisel määrav antud tootemargi seadmele sobiv tundlikkuse ja väljundparameetrite komplekt.







